 English
English
 español
español العربية
العربية





4 Axis Arm Robot with Gripper Arm Cake Pick and Place Robot Machine
Maximum Pick-up Height: the maximum descending distance from the center of the origin position vertical
downward during the pickup process.
Rated Load: the maximum load of the robot under the best performance and normal operation of the robot
Max Load: the maximum load of the robot which is exceeding the rated load. If it go beyond the rated load,
the robot performance index will be affected, the wear problem of the motor, wearing parts, driven arm,
intermediate shaft will be much more seriously

Details--4 Axis Pick Place Delta Robotic Arm

Technical Parameter--High Efficiency Pick and Place Parallel Link Robot


Specification--Delta Robot Arm For Goods Sorting
1. Its body material is mainly made of carbon fiber and aluminum alloy composition;
2. It can accurately identify the target object through a sensor or visual system, motion tracking, picking and placing the target object to the designated position;
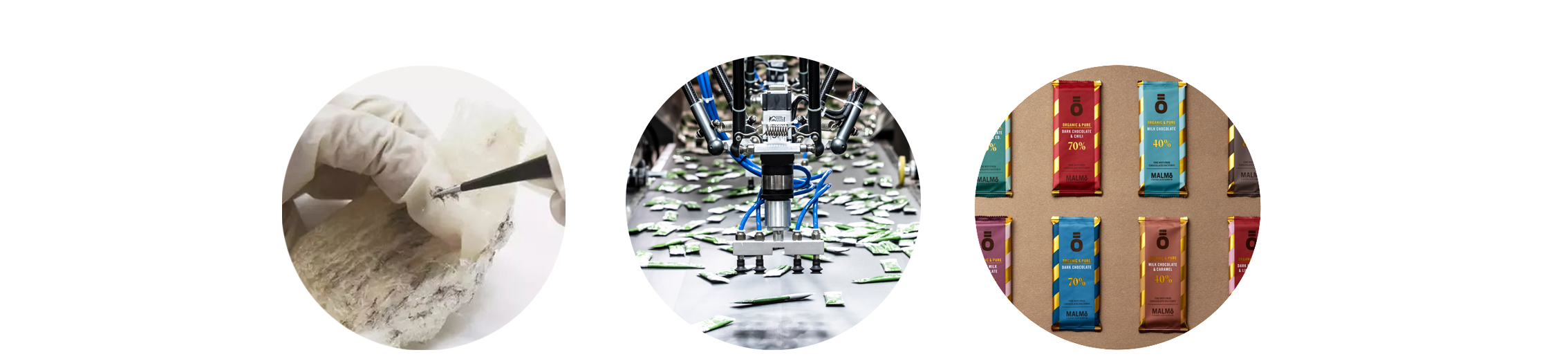
3. The high-speed handling unit with robot functionality forfree movement in three dimensions provides precision in movement and positioning as well as a high dynamic response at a stable speed of 80 picks per minute;
4. The highly rigid mechanical design and low moving mass make the parallel delta kinematic system with toothed belt axes up to three times as fast as comparable Cartesian systems;
5. Three double rods keep the front unit horizontal at all times. The axes and servo motors do not move with the unit;
6. The parallel kinematic system is suitable for handling loads of up to Max 5 kg;
7. The sachet packs picked and placed by the high-speed paralleled robot units system. In-depth visual recognition for sorting out the front and back and the direction of the sachets. Programmed system sorts out sachets by the right numbers. Connected to the carton machine to complete the automation packaging.



Application

Contact Us


1.Maximum Pick-up Height:the maximum descending distance from the center of the origin position verticaldownward during the pickup process。2.Rated Load:the maximum load of the robot under the best performance and normal operation of the robot3.Max Load:the maximum load of the robot which is exceeding the rated load. If it go beyond the rated load,the robot performance index will be affected, the wear problem of the motor, wearing parts, driven arm,intermediate shaft will be much more seriously Min order:1 Payment:T/T ShippingPort:GUANGZHOU Original Region:CHINA Lead Time:15 days after receiving deposit
Read More
Maximum Pick-up Height: the maximum descending distance from the center of the origin position vertical downward during the pickup process.Rated Load: the maximum load of the robot under the best performance and normal operation of the robotMax Load: the maximum load of the robot which is exceeding the rated load. If it go beyond the rated load, the robot performance index will be affected, the wear problem of the motor, wearing parts, driven arm, intermediate shaft will be much more seriously Min order:1 Payment:TT ShippingPort:Guangzhou Original Region:Guangzhou China Lead Time:22 days after receiving deposit
Read More
1.Maximum Pick-up Height:the maximum descending distance from the center of the origin position verticaldownward during the pickup process。2.Rated Load:the maximum load of the robot under the best performance and normal operation of the robot3.Max Load:the maximum load of the robot which is exceeding the rated load. If it go beyond the rated load,the robot performance index will be affected, the wear problem of the motor, wearing parts, driven arm,intermediate shaft will be much more seriously Min order:1 Payment:T/T ShippingPort:GUANGZHOU Original Region:CHINA Lead Time:15 days after receiving deposit
Read More
Save Labour Cost Cookies Pick Place Robot / 3 Axis Pick and Place Robot Maximum Pick-up Height: the maximum descending distance from the center of the origin position vertical downward during the pickup process.Rated Load: the maximum load of the robot under the best performance and normal operation of the robotMax Load: the maximum load of the robot which is exceeding the rated load. If it go beyond the rated load, the robot performance index will be affected, the wear problem of the motor, wearing parts, driven arm, intermediate shaft will be much more seriously Min order:1 Payment:TT ShippingPort:Guangzhou Original Region:Guangzhou China Lead Time:22 days after receiving deposit
Read More
Cake Delta Robot Sorting Line Maximum Pick-up Height: the maximum descending distance from the center of the origin position vertical downward during the pickup process.Rated Load: the maximum load of the robot under the best performance and normal operation of the robotMax Load: the maximum load of the robot which is exceeding the rated load. If it go beyond the rated load,the robot performance index will be affected, the wear problem of the motor, wearing parts, driven arm,intermediate shaft will be much more seriously Min order:1 Payment:TT ShippingPort:Guangzhou Original Region:Guangzhou China Lead Time:22 days after receiving deposit
Read More
4Axis Delta Robot for Picking and Placing is applicable for picking or placing biscuit,candy,tin can,bottle,accessories etc. Item NO:UT-400 Min order:1 Payment:T/T ShippingPort:Guangzhou Original Region:China Lead Time:60days
Read More
1.Maximum Pick-up Height:the maximum descending distance from the center of the origin position verticaldownward during the pickup process。2.Rated Load:the maximum load of the robot under the best performance and normal operation of the robot3.Max Load:the maximum load of the robot which is exceeding the rated load. If it go beyond the rated load,the robot performance index will be affected, the wear problem of the motor, wearing parts, driven arm,intermediate shaft will be much more seriously Min order:1 Payment:T/T ShippingPort:GUANGZHOU Original Region:CHINA Lead Time:15 days after receiving deposit
Read More
Pick and Place Robot Arm Small Industrial Robot Arm for Pharma Industry Maximum Pick-up Height: the maximum descending distance from the center of the origin position vertical downward during the pickup process.Rated Load: the maximum load of the robot under the best performance and normal operation of the robotMax Load: the maximum load of the robot which is exceeding the rated load. If it go beyond the rated load,the robot performance index will be affected, the wear problem of the motor, wearing parts, driven arm,intermediate shaft will be much more seriously Min order:1 Payment:TT ShippingPort:Guangzhou Original Region:Guangzhou China Lead Time:22 days after receiving deposit
Read More











 IPv6 network supported
IPv6 network supported